跳至内容
机器人产品
Rover
Hexplorer
FirstBreath
Rover
从实验室到生命,随时准备提供帮助。从实验室到生命,随时准备提供帮助。
探索
Rover
从实验室到生命,随时准备提供帮助。从实验室到生命,随时准备提供帮助。
探索
Rover
从实验室到生命,随时准备提供帮助。从实验室到生命,随时准备提供帮助。
探索
企业
支持中心
探索
关于我们
博客
新闻
商店
开发者平台
Search for:
Chinese
English
立即购买
观看视频
Hexplorer
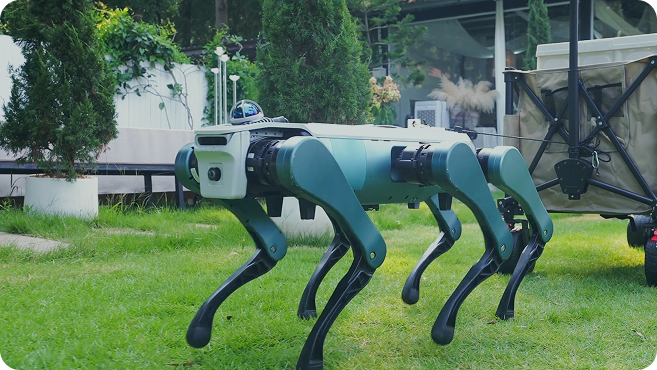
为极端环境设计
立即购买
观看视频
Hexplorer
为极端环境设计
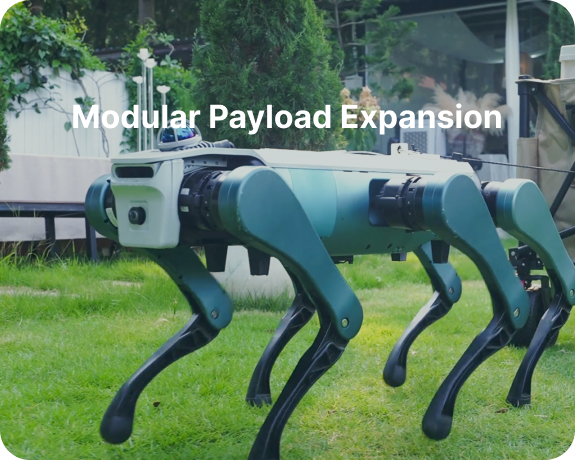
准备好奇,助力而生
六足机器人狗Hexplorer在复杂环境中能够提供稳定、适应性强的性能,并且能够持续长时间工作,因此非常适合用于教育与研究、工业检测以及智能服务等领域。
保持平衡
移动安静
携带更多
立即适应
仿生六条腿,带来无与伦比的稳定性
三脚架步态和动态平衡确保了在湿滑或不平坦地形上的自然稳定性、自我恢复和防倾覆性能
应用场景
在安保、建筑、停车、公用事业和应急响应领域已有经过验证的部署
机器人狗一览对比
概述和移动性
二次开发的SDK。
86.3 × 47 × 48 cm
尺寸
约20公斤(净重)/ 30公斤(包装)
重量
25°
最大坡度适应性
504 Wh
电池容量
≤ 55 dB
噪声水平
Veloz Mid360
激光雷达
73.4 × 47 × 44 cm
尺寸
1.8 m/s
最大步行速度
Rated 10 kg / Max 15 kg
有效载荷能力
2.5 hours
电池寿命
x86_64; Intel Core i7 / 16 cores; GPU 40 TOPS
控制平台架构
Intel RealSense D435i
深度相机
18 DOF
自由度
20 cm
最大障碍物高度
Front/High: -60° to 180°; Rear/High: -60° to 239°; Lower Leg: -10° to -160°; Body Tilt: ±38°
关节活动范围
33 Nm (knee joints)
电机峰值扭矩
支持
演讲者
远程遥控与视频传输(未来);无线自动充电(未来)
外部扩展
对工业用四足机器人感兴趣吗?
获取演示或实际部署的概念验证(PoC)
姓名
电话
邮件
帐号
公司
行业
Select Country
Select Country
Select State
Please select country first
Select City
Please select province/state first
我同意
隐私政策
并且愿意接收通过电子邮件获取最新的 Rover 新闻和优惠。我了解我可以随时取消订阅。
提交
滚动至顶部